


Autonomní robot Agrointelli Robotti letos stihl navštívit několik evropských států včetně České republiky. Vidět ho bylo při prvním nasazení na pozemcích Zemědělské společnosti Sloveč. Tam jej představil dovozce těchto strojů, společnost Leading Farmers, která má dvacetileté zkušenosti s prodejem a servisem precizních a navigačních systémů pro potřeby zemědělství.
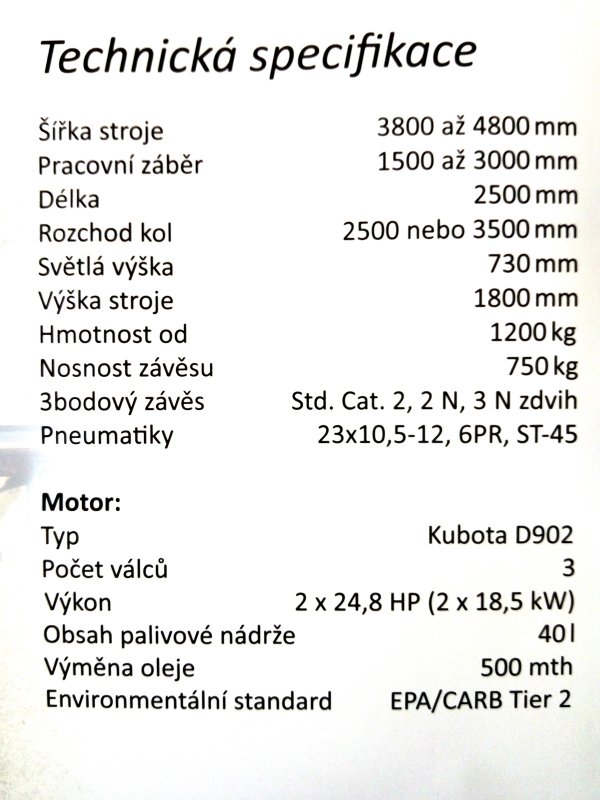
Každý velký výrobce zemědělských strojů má vlastní vizi, jak by v budoucnu měli vypadat autonomní roboti. Agrointelli robota koncipovalo jako nosič nářadí, který potřebuje vzdálený dohled. Zatím je tedy na něj možné zavěsit meziřádkový kultivátor, postřikovač, přesný a mechanický secí stroj. Robotti má velikost menšího traktoru, současně je velmi lehký (1800 kg) a má relativně úzkou pracovní šířku, což znamená, že může být efektivně nasazen při nejrůznějších polních operací.
Robot splňuje stupeň autonomie 4 (autonomní stroj s dohledem), umí však i finální stupeň 5 (plná autonomie). Omezen je na stupeň 4 kvůli legislativě. Robota je tedy nutné na pole dopravit na podvalu a až tam jej spustit. Potřeba je naplánovat trasu, kterou bude stroj jezdit. Robotti využívá k orientaci přesný satelitní signál. Jakmile je pole zmapováno, tak je vypracována nejúčinnější trasa k provedení úlohy. Ovládání stroje se provádí prostřednictvím aplikace na mobilním telefonu nebo tabletu. Obsluha může takto ovládat vzdáleně více strojů najednou, samozřejmostí je manuální režim ovládání.
Hlavně bezpečnost
Robot má ve výbavě řadu bezpečnostních prvků eliminující kolizi s překážkami. Robot neustále skenuje celý prostor a vidí veškeré objekty na poli za pomocí inteligentního systému detekce překážek. Všechna rozhodnutí provádí autonomně, pokud se setká s něčím neobvyklým, okamžitě informuje operátora. Kolem robota je namontován tlakový bezpečnostní senzor, který jej bezpečně zastaví, pokud by se přesto setkal s překážkou. Přítomna jsou i tři manuální bezpečnostní tlačítka, aby bylo možné stroj zastavit i bez použití tabletu.
Mapování porostů a tvorba map
Robot dokáže nejen pracovat se zavěšenými stroji, ale současně provádět mapování pozemku. Systém CloverCam zajistí mapování porostu jetelovin a travin pro další pěstitelská rozhodnutí. Systém Weedmaps zase umožní vytvářet mapy zaplevelení v řádkových kulturách a rozhodnout tak o dalším efektním zásahu. Nyní probíhá vývoj systémů zajišťující komunikaci, aby bylo schopno více takových robotů na jednom poli vzájemně komunikovat a předávat si informace například o již obdělané ploše.
Elektromotor později
Robot disponuje dvojicí tříválcových motorů Kubota o výkonu (2x) 24,8 koní. Palivová nádrž má objem 40 litrů. V budoucnu je v plánu robota vybavit elektromotory. Robot je konstrukčně řešen tak, že po stranách se nachází motory a mezi nimi je zavěšené nářadí. Proto je ve výbavě i klasický tříbodový závěs, aby bylo možné agregovat běžně dostupné nářadí. Všechna kola jsou poháněna a řízena. Pracovní rychlost se pohybuje okolo osmi kilometrů.
Nedostatek pracovníků v zemědělství, málo času
Je to robot, takže se nikdy neunaví. Teoreticky může pracovat téměř nepřetržitě, což lidská síla nedokáže. Bude snáze plnit agrotechnické lhůty a díky svému konstrukčnímu řešení bude šetrnější k půdě. Bude-li mít majitel více takových robotů, postačí mu k jejich provozu jen jeden člověk.
Cena robotu odpovídá malému až středně velkému traktoru. Agrointelli již vyrobilo čtyři stroje. Našlo se také už několik evropských zákazníků. V plánu je pomalejší náběh výroby, očekává se však letos výroba deseti strojů. Letos by měl jeden kus zamířit také do České republiky, bude majetkem společnosti Leading Farmers a poslouží jako předváděcí stroj.
Fotogalerie
































