

Stejně jako v jiných odvětvích, tak i v zemědělství šla technika s technologií kupředu. Ať už to je navigace, automatické otočení na souvrati či autonomní zemědělské stroje. Postupem času kvůli neustálým zpřísňování pravidel a lpěním na co nejpřesnější aplikace vzniklo tzv. precizní zemědělství. To už začíná procesem setí, kdy lze se secím strojem pracovat variabilně a aplikovat hnojivo pod patu, variabilně hnojit průmyslovými hnojivy tam, kde to má význam (např. vynechání holých míst, kde není porost). Dále tu máme aplikaci pesticidů, kdy dronem můžeme například nasnímat lokální výskyt plevele, udělat předpisovou mapu a dle toho aplikovat chemii jen tam, kde je potřeba. Další co do této kategorie patří je mimo jiné variabilní aplikace kejdy.
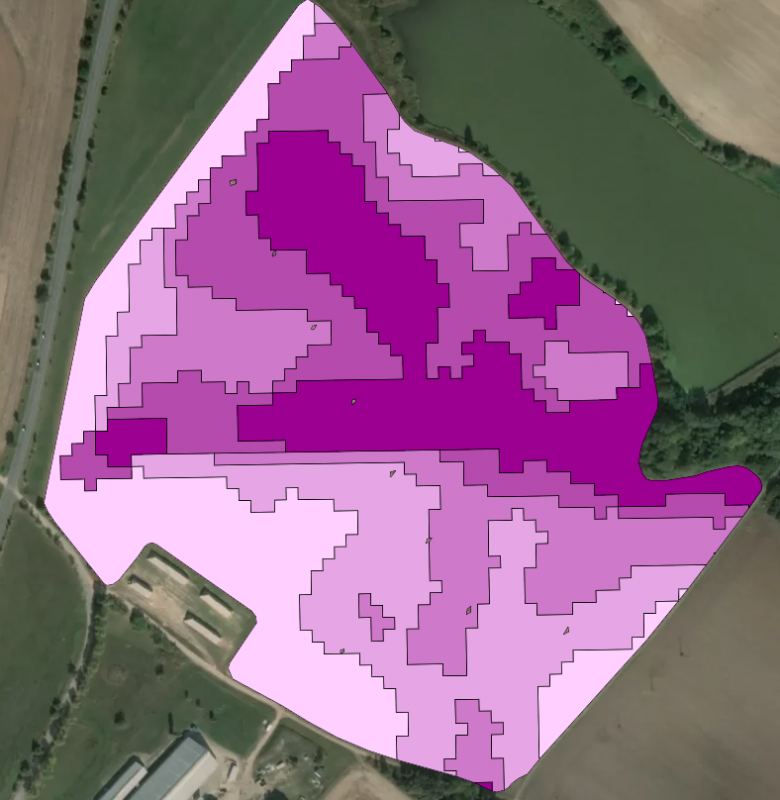
Předpisová mapa pro variabilní dávkování hnojiva
Pro správné fungování variabilní dávky je nejdřív zapotřebí udělat tzv. předpisovou mapu. Jsou dva způsoby, jak toho docílit. Prvním způsobem je použití výnosových map. To je však podmíněno délkou sběru dat. Pro ideální tvorbu je potřeba vlastnit výnosové mapy alespoň 6 let zpětně, aby data byla relevantní.
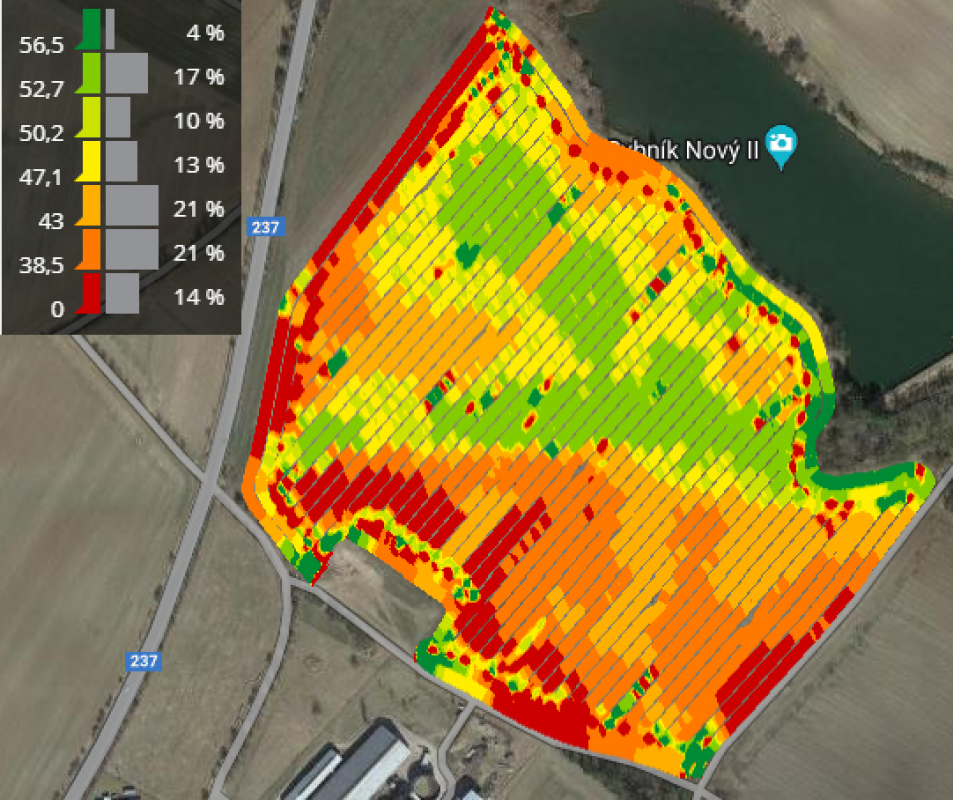
Druhý způsob je tvorba předpisových map dle výnosového potenciálu. Základním zdrojem dat pro vymezení zón jsou satelitní snímky z průběhu vegetačního období za posledních několik let. Tvorba předpisové mapy, je tímto způsobem alternativou k výnosovým mapám v případě jejich nedostupnosti.
Než započne samotné tvoření map, je nutné stanovit, dle jakých parametrů budeme kejdu aplikovat. V našem případě budou primární N-látky. Stanovili jsme, že základní dávka bude 45 kg N/ha, plus dané rozpětí. Dále jsme určili počet zón a také to, že nejmenší bude mít 2 000 metrů čtverečních. V neposlední řadě jsme si určili, že pozemky menší než 5 ha nebudeme variabilně hnojit.
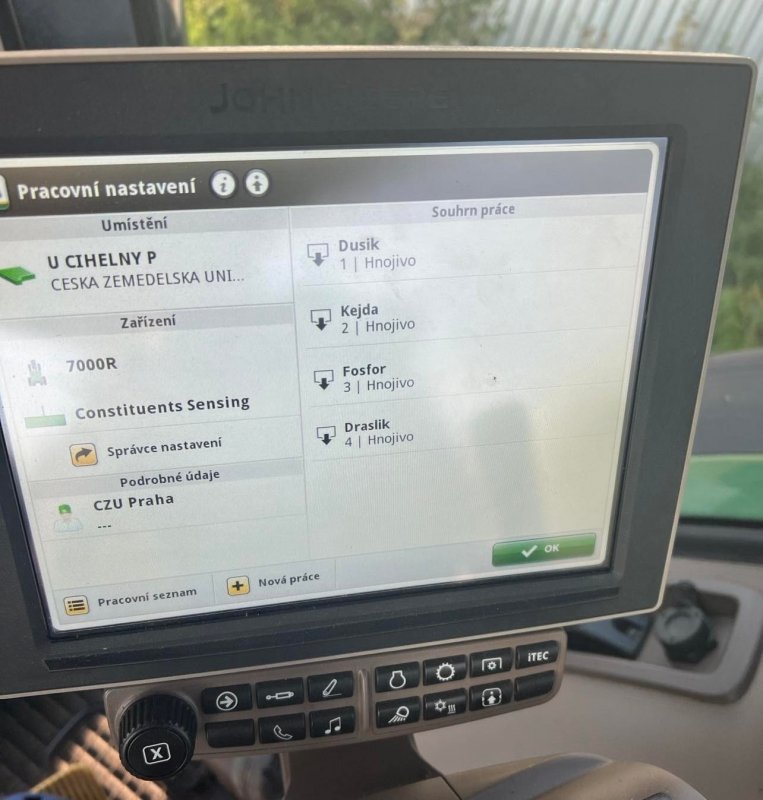
Následně vytvořené předpisové mapy se nahrají do traktoru vybaveného navigací. V našem případě John Deere 7250R a cisternou Annaburger s botkovým aplikátorem Bomech. Na cisterně je agregován HarvestLab, který neustále určuje aplikovanou dávku, dle rozboru aplikovaného materiálu měřením živin.
Po příjezdu na pole se v aplikaci nastaví priority, dle kterých bude aplikace provedena. V našem případě dusík a kejda. Traktor John Deere 7250R pracuje dle navigace na předem dané pojezdové linii a množství dávky je řízena rychlostí celé soupravy.

Fotogalerie